/*
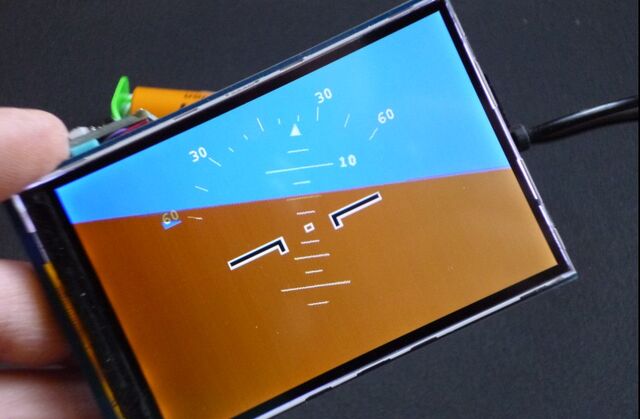
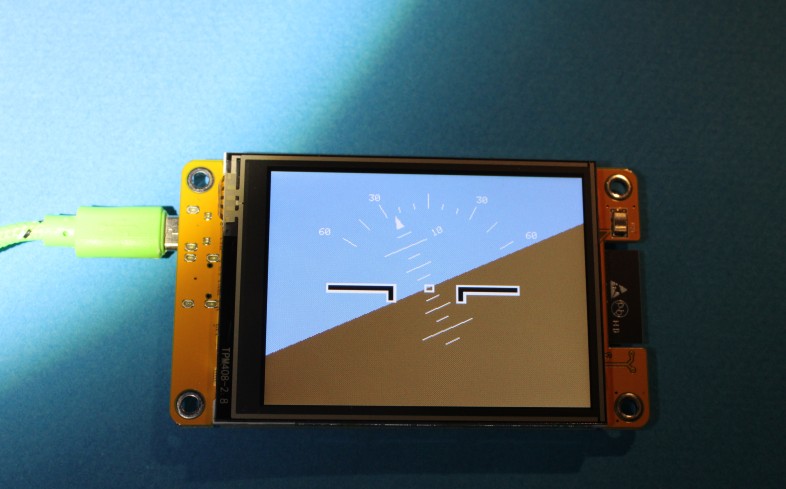
Horizon artificiel ()
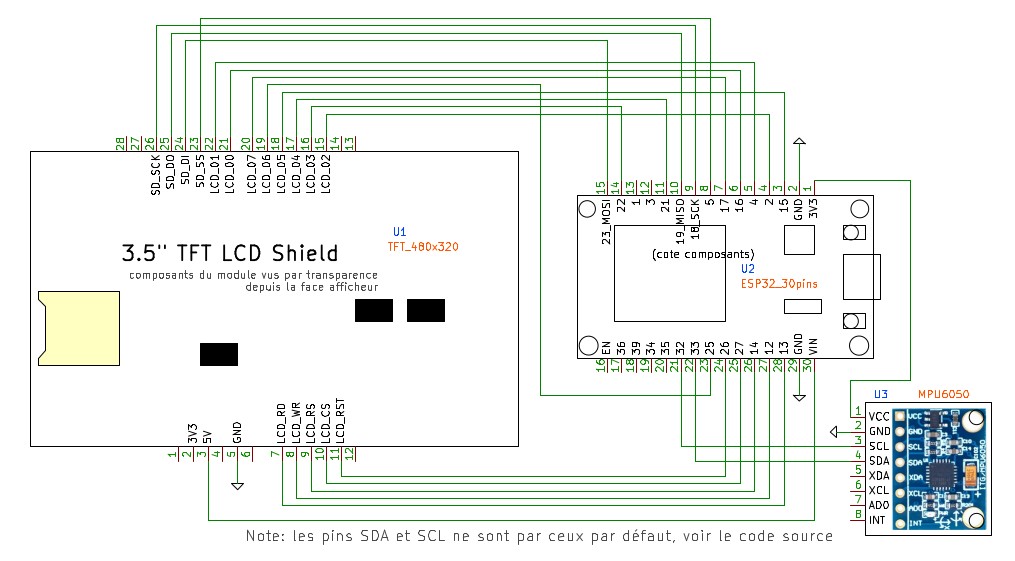
pour ESP32 Wroom + afficheur 2.8" TFT 240x320 (petite carte orange))
par Silicium628
*/
/* ******** IMPORTANT CONCERNANT L'AFFICHAGE TFT ************************
à placer dans le fichier User_Setup.h ( dans ~/Arduino/libraries/TFT_eSPI/ ):
#define ILI9341_2_DRIVER
****************************************************************************/
String version="3.0";
uint8_t fond_blanc = 0;
#include <stdint.h>
#include <TFT_eSPI.h> // Hardware-specific library
#include "SPI.h"
#include "Free_Fonts.h"
#include "FS.h"
#include "SD.h"
TFT_eSPI TFT_SCREEN = TFT_eSPI(); // Configurer le fichier User_Setup.h de la bibliothèque TFT_SCREEN_eSPI au préalable
#include "Wire.h"
#include <MPU6050_light.h>
/*
un scan du bus i2c doit donner ceci (dans le moniteur série):
Scanning...
I2C device found at address 0x68
done
*/
//***************************** IMPORTANT !!!*******************************
// il faut décommenter les 4 lignes ci-dessous qui correspondent à l'afficheur utilisé et commenter les 4 autres
// et penser à placer le bon fichier User_Setup.h (dans ~/Arduino/libraries/TFT_eSPI/ ):
//***************************************************************************
// ------------------------------
const int _DX = 480;
const int _DY = 320;
const int GPIO_SDA = 33;
const int GPIO_SCL = 32;
// ------------------------------
// ------------------------------
// const int _DX = 320
// const int _DY = 240
// const int GPIO_SDA = 27;
// const int GPIO_SCL = 22;
// ------------------------------
//***************************************************************************
//mémorisation des pixels de 2 lignes H et de 2 lignes V
//ce qui permet d'afficher un rectangle mobile sur l'image sans l'abimer
uint16_t data_L1[_DX]; // pixels d'une ligne Horizontale
uint16_t data_L2[_DX]; // pixels d'une autre ligne Horizontale
uint16_t data_C1[_DY]; // pixels d'une ligne Verticale ('C' comme colonne)
uint16_t data_C2[_DY]; // pixels d'une autre ligne Verticale
uint16_t x_1; // position reçu du module positionneur_XY
uint16_t x_2; // position reçu du module positionneur_XY
uint16_t y_1;
uint16_t y_2;
uint16_t memo_x1;
uint16_t memo_y1; // position de la ligne
uint16_t memo_x2;
uint16_t memo_y2;
uint16_t memo_x_pivot;
uint16_t memo_y_pivot;
float AngleX;
float AngleY;
float AngleZ;
char var_array32[10];// 10 char + zero terminal - pour envoi par WiFi (because 2^32 -1 = 4294967295 -> 10 caractères)
// =====================================================================
#define _pi 3.141592653
float raddeg =_pi/180.0;
float roulis;
float memo_roulis;
float R_2, T_2;
float memo_R_2, memo_T_2;
float tangage;
float memo_tangage;
float cap;
// un outil en ligne bien utile pour composer les couleurs RGB565
// https://rgbcolorpicker.com/565
#define NOIR 0x0000
#define MARRON 0x3920
#define ROUGE 0xF800
#define ROSE 0xFBDD
#define ORANGE 0xFBC0
#define JAUNE 0xFFE0
#define JAUNE_PALE 0xF7F4
#define VERT 0x07E0
#define VERT_FONCE 0x02E2
#define OLIVE 0x05A3
#define CYAN 0x07FF
#define BLEU_CLAIR 0x455F
#define AZUR 0x1BF9
#define BLEU 0x001F
#define MAGENTA 0xF81F
#define VIOLET1 0x781A
#define VIOLET_2 0xECBE
#define GRIS_TRES_CLAIR 0xDEFB
#define GRIS_CLAIR 0xA534
#define GRIS 0x8410
#define GRIS_FONCE 0x5ACB
#define GRIS_TRES_FONCE 0x2124
#define BLANC 0xFFFF
#define GRIS_AF 0x51C5 // 0x3985
#define HA_CIEL 0x33FE
uint16_t HA_SOL; // renseignée dans le setup
// Width and height of sprite
#define SPR_W 25
#define SPR_H 16
uint16_t couleur_txt = BLANC;
uint16_t couleur_fond = GRIS_TRES_FONCE; //GRIS_TRES_FONCE;
uint16_t couleur_fond_txt = VERT_FONCE;
uint16_t couleur_fond_gradu = HA_CIEL;
TFT_eSprite SPR_HA = TFT_eSprite(&TFT_SCREEN);
TFT_eSprite SPR_10 = TFT_eSprite(&TFT_SCREEN);
TFT_eSprite SPR_10_ciel = TFT_eSprite(&TFT_SCREEN);
TFT_eSprite SPR_10_sol = TFT_eSprite(&TFT_SCREEN);
//position et dimensions de l'horizon artificiel
uint16_t HA_x0 = _DX /2;
uint16_t HA_y0 = _DY /2;
uint16_t HA_w = _DX * 1.5; // plus large que la dimension _DX pour couvrir la diagonale ("dans les coins")
#define HA_h 24
MPU6050 mpu(Wire);
//unsigned long timer = 0;
uint8_t flag_SDcardOk=0;
uint8_t flag_1er_passage =1;
uint8_t TEST_AFFI;
uint32_t compte=0;
float degTOrad(float angle)
{
return (angle * M_PI / 180.0);
}
uint8_t decToBcd( int val )
{
return (uint8_t) ((val / 10 * 16) + (val % 10));
}
uint16_t Color_To_565(uint8_t r, uint8_t g, uint8_t b)
{
return ((r & 0xF8) << 8) | ((g & 0xFC) << 3) | ((b & 0xF8) >> 3);
}
void RGB565_to_888(uint16_t color565, uint8_t *R, uint8_t *G, uint8_t *B)
{
*R=(color565 & 0xFFFFF800) >> 8;
*G=(color565 & 0x7E0) >> 3;
*B=(color565 & 0x1F) << 3 ;
}
void init_SDcard()
{
String s1;
TFT_SCREEN.fillRect(0, 0, _DX, _DY, NOIR); // efface
TFT_SCREEN.setTextColor(BLANC, NOIR);
TFT_SCREEN.setFreeFont(FF0);
uint16_t y=0;
y+=20;
s1="version " + version;
TFT_SCREEN.drawString(s1, 0, y);
y+=40;
TFT_SCREEN.setTextColor(VERT, NOIR);
TFT_SCREEN.drawString("Init SDcard", 0, y);
y+=20;
if(!SD.begin())
{
TFT_SCREEN.drawString("Card Mount Failed", 0, y);
delay (2000);
TFT_SCREEN.fillRect(0, 0, _DX, _DY, NOIR); // efface
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE)
{
TFT_SCREEN.drawString("No SDcard", 0, y);
delay (2000);
TFT_SCREEN.fillRect(0, 0, _DX, _DY, NOIR); // efface
return;
}
flag_SDcardOk=1;
TFT_SCREEN.drawString("SDcard Type: ", 0, y);
if(cardType == CARD_SD) {TFT_SCREEN.drawString("SDSC", 150, y);}
else if(cardType == CARD_SDHC) {TFT_SCREEN.drawString("SDHC", 150, y);}
y+=20;
uint32_t cardSize = SD.cardSize() / (1024 * 1024);
s1=(String)cardSize + " GB";
TFT_SCREEN.drawString("SDcard size: ", 0, y);
TFT_SCREEN.drawString(s1, 150, y);
// listDir(SD, "/", 0);
//Serial.printf("Total space: %lluMB\n", SD.totalBytes() / (1024 * 1024));
//Serial.printf("Used space: %lluMB\n", SD.usedBytes() / (1024 * 1024));
delay (1000);
TFT_SCREEN.fillRect(0, 0, _DX, _DY, NOIR); // efface
}
/** -----------------------------------------------------------------------------------
CAPTURE D'ECRAN vers SDcard
/** ----------------------------------------------------------------------------------- */
void write_TFT_on_SDcard() // enregistre le fichier .bmp
{
//TFT_SCREEN.setTextColor(VERT, NOIR);
//TFT_SCREEN.drawString("CP", 450, 300);
if (flag_SDcardOk==0) {return;}
String s1;
uint16_t ys=200;
TFT_SCREEN.setFreeFont(FF0);
TFT_SCREEN.setTextColor(JAUNE, NOIR);
uint16_t x, y;
uint16_t color565;
uint16_t bmp_color;
uint8_t R, G, B;
if( ! SD.exists("/bmp/capture2.bmp"))
{
TFT_SCREEN.fillRect(0, 0, _DX, _DY, NOIR); // efface
TFT_SCREEN.setTextColor(ROUGE, NOIR);
TFT_SCREEN.drawString("NO /bmp/capture2.bmp !", 100, ys);
delay(300);
TFT_SCREEN.fillRect(100, ys, 220, 20, NOIR); // efface
return;
}
File File1 = SD.open("/bmp/capture2.bmp", FILE_WRITE); // ouverture du fichier binaire (vierge) en écriture
if (File1)
{
/*
Les images en couleurs réelles BMP888 utilisent 24 bits par pixel:
Il faut 3 octets pour coder chaque pixel, en respectant l'ordre de l'alternance bleu, vert et rouge.
*/
uint16_t bmp_offset = 138;
File1.seek(bmp_offset);
TFT_SCREEN.setTextColor(VERT, NOIR);;
for (y = _DY; y>0; y--)
{
for (x=0; x < _DX; x++)
{
color565=TFT_SCREEN.readPixel(x, y);
RGB565_to_888(color565, &R, &G, &B);
File1.write(B); //G
File1.write(G); //R
File1.write(R); //B
}
s1=(String) (y/10);
TFT_SCREEN.fillRect(_DX -30, _DY -30, 20, 20, NOIR);
TFT_SCREEN.drawString(s1, _DY -30, 300);// affi compte à rebour
}
File1.close(); // referme le fichier
TFT_SCREEN.fillRect(_DX -30, _DY -30, 20, 20, NOIR); // efface le compte à rebour
}
}
/** ----------------------------------------------------------------------------------- */
void Draw_arc_elliptique(uint16_t x0, uint16_t y0, int16_t dx, int16_t dy, float alpha1, float alpha2, uint16_t couleur)
// alpha1 et alpha2 en radians
{
/*
REMARQUES :
-cette fonction permet également de dessiner un arc de cercle (si dx=dy), voire le cercle complet
- dx et dy sont du type int (et pas uint) et peuvent êtres négafifs, ou nuls.
-alpha1 et alpha2 sont les angles (en radians) des caps des extrémités de l'arc
*/
uint16_t n;
float i;
float x,y;
i=alpha1;
while(i<alpha2)
{
x=x0+dx*cos(i);
y=y0+dy*cos(i+M_PI/2.0);
TFT_SCREEN.drawPixel(x,y, couleur);
i+=0.01; // radians
}
}
void affi_rayon2(uint16_t x0, uint16_t y0, float r1, float R_2, float angle_i, uint16_t couleur_i)
{
// trace une portion de rayon de cercle entre les distances r1 et R_2 du centre
// angle_i en degrés décimaux - sens trigo
float angle = degTOrad(angle_i);
int16_t x1, x2;
int16_t y1, y2;
x1=x0+int16_t(r1* cos(angle));
y1=y0-int16_t(r1* sin(angle));
x2=x0+int16_t(R_2* cos(angle));
y2=y0-int16_t(R_2* sin(angle));
if ((x1>0) && (x2>0) && (y1>0) && (y2>0) && (x1<_DX) && (x2<_DX) && (y1<_DY) && (y2<_DY) )
{
TFT_SCREEN.drawLine(x1, y1, x2, y2, couleur_i);
}
}
void affi_pointe(uint16_t x0, uint16_t y0, uint16_t r, uint16_t dr, double angle_i, float taille, uint16_t couleur_i)
{
// trace une pointe de flèche sur un cercle de rayon r
// angle_i en degrés décimaux - sens trigo
float angle = degTOrad(angle_i);
int16_t x1, x2, x3;
int16_t y1, y2, y3;
x1=x0+r* cos(angle); // pointe
y1=y0-r* sin(angle); // pointe
x2=x0+(r-dr)* cos(angle-taille); // base A
y2=y0-(r-dr)* sin(angle-taille); // base A
x3=x0+(r-dr)* cos(angle+taille); // base B
y3=y0-(r-dr)* sin(angle+taille); // base B
TFT_SCREEN.fillTriangle(x1, y1, x2, y2, x3, y3, couleur_i);
}
void affi_base(uint16_t x0, uint16_t y0, float r, float angle_i, float delta_angle_i, uint16_t couleur_i)
{
// trace un trait tangent sur un cercle fictif de rayon r
// angle_i en degrés décimaux, sens trigo
float angle =angle_i / 57.3; // (57.3 ~ 180/pi)
float delta_angle = delta_angle_i / 57.3;
int16_t x2, x3;
int16_t y2, y3;
x2=x0+ r * cos(angle-delta_angle); // x du point A de la base du triangle
y2=y0- r * sin(angle-delta_angle); // y
x3=x0+ r * cos(angle+delta_angle); // x du point B de la base du triangle
y3=y0- r * sin(angle+delta_angle); // y
TFT_SCREEN.drawLine(x2, y2, x3, y3, couleur_i);
}
void init_sprites()
{
SPR_HA.createSprite(HA_w, HA_h);
SPR_HA.setPivot(HA_w/2, HA_h/2);
SPR_HA.fillSprite(NOIR); // pour test en rotation --> BLEU
SPR_HA.fillRect(0, 0, HA_w, HA_h/2, HA_CIEL);
SPR_HA.fillRect(0, HA_h/2, HA_w, HA_h/2, HA_SOL);
// sprite représentant le nombre '10' sur fond noir
SPR_10.createSprite(SPR_W, SPR_H);
SPR_10.setFreeFont(FF0); // FF5
SPR_10_ciel.setTextColor(BLANC, NOIR);
SPR_10.fillSprite(NOIR);
SPR_10.drawString("10", 2, 2 );
SPR_10.setPivot(SPR_W/2, SPR_H/2); // Set pivot relative to top left corner of Sprite
// sprite représentant le nombre '10' sur fond bleu
SPR_10_ciel.createSprite(SPR_W, SPR_H);
SPR_10_ciel.setFreeFont(FF0); // FF5
SPR_10_ciel.setTextColor(BLANC, HA_CIEL);
SPR_10_ciel.fillSprite(HA_CIEL);
SPR_10_ciel.setPivot(SPR_W/2, SPR_H/2); // Set pivot relative to top left corner of Sprite
SPR_10_ciel.drawString("10", 2, 2 );
// sprite représentant le nombre '10' sur fond marron
SPR_10_sol.createSprite(SPR_W, SPR_H);
SPR_10_sol.setFreeFont(FF0); // FF5
SPR_10_ciel.setTextColor(BLANC, HA_SOL);
SPR_10_sol.fillSprite(HA_SOL);
SPR_10_sol.setPivot(SPR_W/2, SPR_H/2); // Set pivot relative to top left corner of Sprite
SPR_10_sol.drawString("10", 2, 2 );
}
void affi_HA(float R_in, float T_in) // Navigation Display (le grand cercle avec les différents affichages dessus)
{
//float angle1;
int16_t x_pivot, y_pivot;
int16_t x0= _DX/2;
int16_t y0= _DY/2;
x_pivot = x0 + T_in * sin(degTOrad(R_in));
y_pivot = y0 + T_in * cos(degTOrad(R_in));
TFT_SCREEN.setPivot(x_pivot, y_pivot);
SPR_HA.pushRotated(-R_in); // affiche la ligne de séparation ciel/sol
dessine_avion();
// graduations
for (int n=1; n<=10; n++)
{
float r = 10.0;
float ech = (float)_DX/480.0; // donne 1.0 pour un afficheur 320x480, 0.6 pour un afficheur 240x320
float delta_angle = 10.0;
if (n==1) {delta_angle = 30.0; r = -20 * ech;}
if (n==2) {delta_angle = 30.0; r = -40 * ech;}
if (n==3) {delta_angle = 10.0; r = -53 * ech;}
if (n==4) {delta_angle = 30.0; r = -80 * ech;}
if (n==5) {delta_angle = 7.0; r = -90 * ech;}
if (n==6) {delta_angle = 30.0; r = 20 * ech;}
if (n==7) {delta_angle = 30.0; r = 40 * ech;}
if (n==8) {delta_angle = 10.0; r = 53 * ech;}
if (n==9) {delta_angle = 30.0; r = 80 * ech;}
if (n==10){delta_angle = 7.0; r = 90 * ech;}
if (r > T_in) {couleur_fond_gradu = HA_SOL;} else {couleur_fond_gradu = HA_CIEL;}
//TFT_SCREEN.fillRect(452, 90+r, 5, 5, couleur_fond_gradu); // pour test
affi_base(x0, y0, -r, memo_roulis + 90, delta_angle, couleur_fond_gradu); // efface
affi_base(x0, y0, -r, R_in + 90, delta_angle, BLANC); // trace
}
// affichage de l'étiquette '10' sur la graduation
x_pivot = x0 - 60 * sin(degTOrad(R_2-38)); // 90
y_pivot = y0 - 60 * cos(degTOrad(R_2-38));
uint16_t couleur1;
int16_t limite = -70;
if (T_2 < limite){couleur1 = HA_SOL;} else {couleur1 = HA_CIEL;}
TFT_SCREEN.fillRect(memo_x_pivot-16, memo_y_pivot-12, 32, 22, couleur1); // efface
TFT_SCREEN.setPivot(x_pivot, y_pivot);
SPR_10.pushRotated(-R_2, NOIR);
//dessine_avion();
memo_x_pivot = x_pivot;
memo_y_pivot = y_pivot;
//void affi_pointe(uint16_t x0, uint16_t y0, uint16_t r, uint16_t dr, double angle_i, float taille, uint16_t couleur_i)
affi_pointe(_DX/2, _DY/2, _DY/2 -40, 12, memo_roulis+90, 0.05, HA_CIEL);
affi_pointe(_DX/2, _DY/2, _DY/2 -40, 12, R_in+90, 0.05, BLANC);
float alpha;
uint8_t z;
// graduations 10 20 30 45 60
affi_graduation_fixe();
memo_roulis = R_in;
}
void dessine_avion() // sous forme d'équerres horizontales noires entourées de blanc
{
// aile gauche
TFT_SCREEN.fillRect(HA_x0-102, HA_y0-3, 60, 10, BLANC); //H contour en blanc
TFT_SCREEN.fillRect(HA_x0-42, HA_y0-3, 10, 19, BLANC); //V
TFT_SCREEN.fillRect(HA_x0-100, HA_y0-1, 60, 5, NOIR); //H
TFT_SCREEN.fillRect(HA_x0-40, HA_y0-1, 5, 15, NOIR); //V
// aile droite
TFT_SCREEN.fillRect(HA_x0+28, HA_y0-3, 64, 10, BLANC); //H contour en blanc
TFT_SCREEN.fillRect(HA_x0+28, HA_y0-3, 10, 19, BLANC); //V
TFT_SCREEN.fillRect(HA_x0+30, HA_y0-1, 60, 5, NOIR); //H
TFT_SCREEN.fillRect(HA_x0+30, HA_y0-1, 5, 15, NOIR); //V
//carré blanc au centre
TFT_SCREEN.fillRect(HA_x0-4, HA_y0-3, 8, 2, BLANC);
TFT_SCREEN.fillRect(HA_x0-4, HA_y0-3, 2, 8, BLANC);
TFT_SCREEN.fillRect(HA_x0-4, HA_y0+3, 10, 2, BLANC);
TFT_SCREEN.fillRect(HA_x0+4, HA_y0-3, 2, 8, BLANC);
}
void affi_ligne1_V(uint16_t x)
{
/** DOC: (source : "TFT_eSPI.h")
// The next functions can be used as a pair to copy screen blocks (or horizontal/vertical lines) to another location
// Read a block of pixels to a data buffer, buffer is 16 bit and the size must be at least w * h
void readRect(int32_t x, int32_t y, int32_t w, int32_t h, uint16_t *data);
// Write a block of pixels to the screen which have been read by readRect()
void pushRect(int32_t x, int32_t y, int32_t w, int32_t h, uint16_t *data);
**/
TFT_SCREEN.pushRect(memo_x1, 0, 1, _DY, data_C1); // efface la ligne en replaçant l'image
memo_x1=x;
TFT_SCREEN.readRect(x, 0, 1, _DY, data_C1); // memorisation de la ligne avant de tracer dessus
//TFT_SCREEN.drawFastVLine(x, 0, _DY, ROUGE);
TFT_SCREEN.drawFastVLine(x, y_1, y_2-y_1, JAUNE);
}
void affi_ligne2_V(uint16_t x)
{
TFT_SCREEN.pushRect(memo_x2, 0, 1, _DY, data_C2); // efface la ligne en replaçant l'image
memo_x2=x;
TFT_SCREEN.readRect(x, 0, 1, _DY, data_C2); // memorisation de la ligne avant de tracer dessus
//TFT_SCREEN.drawFastVLine(x, 0, _DY, ROUGE);
TFT_SCREEN.drawFastVLine(x, y_1, y_2-y_1, JAUNE);
}
void affi_ligne1_H(uint16_t y)
{
TFT_SCREEN.pushRect(0, memo_y1, _DX, 1, data_L1); // efface la ligne en replaçant l'image
memo_y1=y;
TFT_SCREEN.readRect(0, y, _DX, 1, data_L1); // memorisation de la ligne avant de tracer dessus
//TFT_SCREEN.drawFastHLine(0, y, 480, ROUGE);
TFT_SCREEN.drawFastHLine(x_1, y, x_2-x_1, JAUNE);
}
void affi_ligne2_H(uint16_t y)
{
TFT_SCREEN.pushRect(0, memo_y2, _DX, 1, data_L2); // efface la ligne en replaçant l'image
memo_y2=y;
TFT_SCREEN.readRect(0, y, _DX, 1, data_L2); // memorisation de la ligne avant de tracer dessus
//TFT_SCREEN.drawFastHLine(0, y, 480, ROUGE);
TFT_SCREEN.drawFastHLine(x_1, y, x_2-x_1, JAUNE);
}
void setup()
{
Serial.begin(115200);
Wire.begin(GPIO_SDA, GPIO_SCL, 100000); // OK (source: https://randomnerdtutorials.com/esp32-i2c-communication-arduino-ide/ )
// en conséquence câbler le MPU6050 en i2C sur les GPIO 27 et GPIO 22 de l'ESP32 (à la place de 21, 22 par défaut)
Serial.println("display.init()");
if(_DX == 480) {HA_SOL = 0xAA81;}
if(_DX == 320) {HA_SOL = 0x3920;}
TFT_SCREEN.init();
TFT_SCREEN.setRotation(3); // 0..3 à voir, suivant disposition de l'afficheur et sa disposition
TFT_SCREEN.fillScreen(NOIR);
TFT_SCREEN.setTextColor(BLANC, NOIR);
TFT_SCREEN.setFreeFont(FF0);
uint16_t y=0;
Serial.println("Horizon artificiel");
delay(300);
TFT_SCREEN.drawString("Horizon artificiel", 0, y);
y+=20;
String s1="version " + version;
TFT_SCREEN.drawString(s1, 0, y);
y+=20;
delay(300);
byte status = mpu.begin();
s1="MPU6050 status:" + String(status);
TFT_SCREEN.setTextColor(JAUNE, NOIR);
TFT_SCREEN.drawString(s1, 0, y);
y+=20;
////while(status!=0){ } // stop everything if could not connect to MPU6050
TFT_SCREEN.setTextColor(BLANC, NOIR);
s1="Calcul offsets, do not move MPU6050";
Serial.println(s1);
TFT_SCREEN.drawString(s1, 0, y);
y+=20;
delay(1000);
// mpu.upsideDownMounting = true; // uncomment this line if the MPU6050 is mounted upside-down
mpu.calcOffsets(); // gyro and acceler.
TFT_SCREEN.setTextColor(VERT, NOIR);
s1="OK!\n";
TFT_SCREEN.drawString(s1, 0, y);
y+=20;
delay(1000);
TFT_SCREEN.setTextColor(TFT_BLUE, TFT_BLACK);
//TFT_SCREEN.setTextFont(1);
TFT_SCREEN.setCursor(0, 40, 1);
TFT_SCREEN.fillScreen(couleur_fond);
//init_SDcard();
init_sprites();
TFT_SCREEN.fillRect(0, 0, _DX, _DY/2, HA_CIEL);
TFT_SCREEN.fillRect(0, _DY/2, _DX, _DY, HA_SOL);
R_2=0;
T_2=0;
affi_HA(R_2,T_2);
x_1=0;
y_1=0;
mpu.update();
tangage = 0;
roulis = 0;
TEST_AFFI=0;
for(int n=0; n<200; n++)
{
mpu.update(); // calme la bête !
}
///delay(1000);
///write_TFT_on_SDcard();
Serial.println("fin du setup");
}
void affi_graduation_fixe() // suivant un arc de cercle en haut de l'écran
{
int16_t x0= _DX /2;
int16_t y0= _DY /2;
affi_rayon2(x0, y0, _DY/2 -35, _DY/2 -20, 90, BLANC);
affi_rayon2(x0, y0, _DY/2 -35, _DY/2 -30, 90-10, BLANC);
affi_rayon2(x0, y0, _DY/2 -35, _DY/2 -30, 90-20, BLANC);
affi_rayon2(x0, y0, _DY/2 -35, _DY/2 -20, 90-30, BLANC);
affi_rayon2(x0, y0, _DY/2 -35, _DY/2 -20, 90-45, BLANC);
affi_rayon2(x0, y0, _DY/2 -35, _DY/2 -20, 90-60, BLANC);
affi_rayon2(x0, y0, _DY/2 -35, _DY/2 -30, 90+10, BLANC);
affi_rayon2(x0, y0, _DY/2 -35, _DY/2 -30, 90+20, BLANC);
affi_rayon2(x0, y0, _DY/2 -35, _DY/2 -20, 90+30, BLANC);
affi_rayon2(x0, y0, _DY/2 -35, _DY/2 -20, 90+45, BLANC);
affi_rayon2(x0, y0, _DY/2 -35, _DY/2 -20, 90+60, BLANC);
TFT_SCREEN.setFreeFont(FF0);
TFT_SCREEN.setTextColor(BLANC, HA_CIEL);
TFT_SCREEN.drawString("30", x0+50, 23);
TFT_SCREEN.drawString("30", x0-60, 23);
TFT_SCREEN.drawString("60", x0+100, 60); // 125
TFT_SCREEN.drawString("60", x0-110, 60); // 150
}
void affichages()
{
//les lignes suivantes obligent la rotation pas à pas
//if (R_2<roulis-10) { affi_HA(R_2, T_2); R_2+=2.5; }
if (R_2<roulis-3) { affi_HA(R_2, T_2); R_2+=2; }
else if (R_2<roulis) { affi_HA(R_2, T_2); R_2++; }
//if (R_2>roulis+10) { affi_HA(R_2, T_2); R_2-=2.5; }
if (R_2>roulis+3) { affi_HA(R_2, T_2); R_2-=2; }
else if (R_2>roulis) { affi_HA(R_2, T_2); R_2--; }
if (T_2<tangage-3) { affi_HA(R_2, T_2); T_2+=2; }
else if (T_2<tangage) { affi_HA(R_2, T_2); T_2++; }
if (T_2>tangage+3) { affi_HA(R_2, T_2); T_2-=2; }
else if (T_2>tangage) { affi_HA(R_2, T_2); T_2--;}
}
float t=0;
float dt=2;
void loop()
{
if(TEST_AFFI==1) //1 pour test des affichages
{
roulis = t/2;
tangage = 0; // 60.0*sin(t/134);
//roulis= 25.0;
//tangage = 0.0;
affichages();
t += dt; // 3*dt ...
if ((t==60)||(t== -60)) {dt = -dt;}
}
else
{
mpu.update();
AngleX=mpu.getAngleX();
AngleY=mpu.getAngleY();
AngleZ=mpu.getAngleZ();
//timer = millis();
tangage = -5.0*AngleX;
roulis = -1.0*AngleY;
affichages();
compte++;
delay(1);
// if (compte==100) {write_TFT_on_SDcard();}
}
}